Hoofdstuk 3.9
Robotveiligheid - van “kooien” tot “cobots”
Hieronder hebben we de belangrijkste informatie over veiligheidsconcepten voor uw robottoepassing samengevat. Leer hoe u de toegang tot gevaren kunt voorkomen, robotbewegingen kunt beperken en een veilige interactie tussen mens en robot kunt garanderen. Ontdek het belang van veiligheidsomheiningen, geavanceerde detectiesystemen en het belang van het plannen van werkruimten voor samenwerking.
Normen en essentiële regels voor robotveiligheid
Robots zijn ongelooflijk veelzijdig en bieden economische automatiseringsoplossingen. Ze kunnen echter ook heel gevaarlijk zijn.
Vooral grote robots met hoge snelheden kunnen zeer ernstig letsel veroorzaken door beknelling en stoten. Daarom is robotveiligheid internationaal gestandaardiseerd in (EN) ISO 10218-1 en -2 en voor de VS in de bijna identieke ANSI/RIA R15.06. Daarnaast is er een norm voor mobiele robots gepubliceerd in ANSI/RIA R15.08. . Hieronder volgen enkele belangrijke veiligheidsregels.
Robotveiligheid is gebaseerd op drie elementen:
- Voorkom toegang door mensen
- Robotbeweging beperken
- Maak lichamelijk contact veilig
Het derde element, het veilig maken van fysiek contact, is een relatief nieuw concept dat vaak collaboratieve robotbediening wordt genoemd. Het betekent dat een speciaal ontworpen robotsysteem en een operator werken binnen dezelfde werkruimte of overlappende werkruimten. Eerst moeten de werkruimte voor samenwerking en de gewenste interactie tussen mens en robot worden gepland. Vervolgens worden de risico's geïdentificeerd en passende veiligheidsmaatregelen geïmplementeerd.

Wat is een “collaboratieve robot”?
De meest geavanceerde veiligheidsmaatregel is het gebruik van een samenwerkende robot, ook wel “cobot” genoemd.
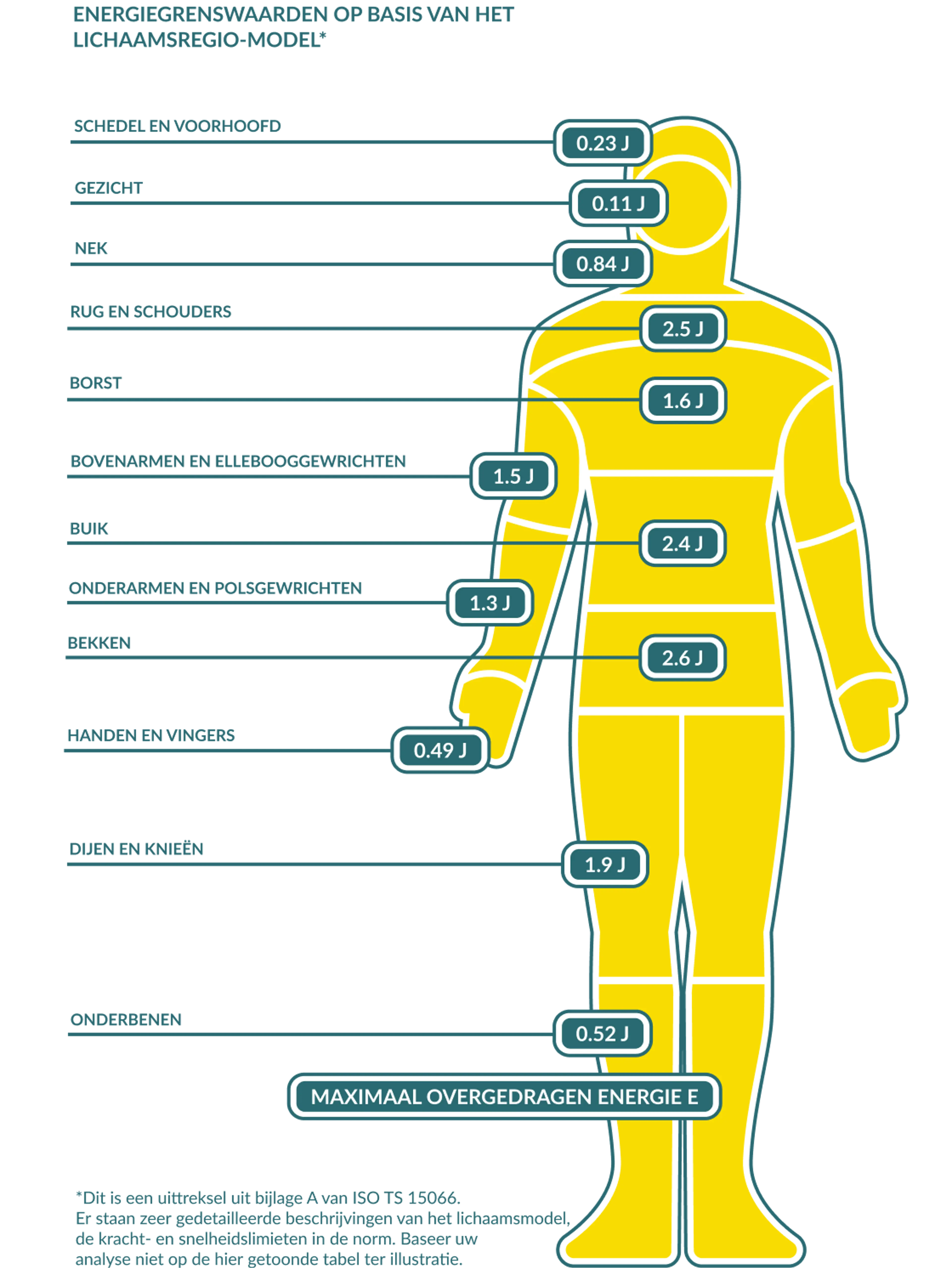
Een collaboratieve robot werkt met beperkte kracht en snelheid. Mensen die in aanraking komen met een bewegende collaboratieve robot zullen niet gewond raken, hoewel ze wel wat pijn kunnen voelen. Jaren van uitgebreid testen hebben geresulteerd in een lijst van kracht-, snelheids- en energielimieten die mensen kunnen verdragen wanneer ze worden blootgesteld aan fysiek contact met machine-elementen (zie ISO TS 15066).
collaboratieve robots die binnen deze grenzen bewegen, kunnen als veilig worden beschouwd voor interactie tussen mens en robot. Dat betekent echter niet dat dergelijke toepassingen automatisch veilig zijn. De volledige context van de robot en het gereedschap dat door de robot wordt gehanteerd (de eindeffector) moet zorgvuldig worden overwogen.
Voorbeeld:
- Stel je voor dat je naast een robot zit die een spuit met giftige vloeistof hanteert. De snelheid en kracht van zijn bewegingen zijn plots van secundair belang.
Veiligheid in werkomgevingen
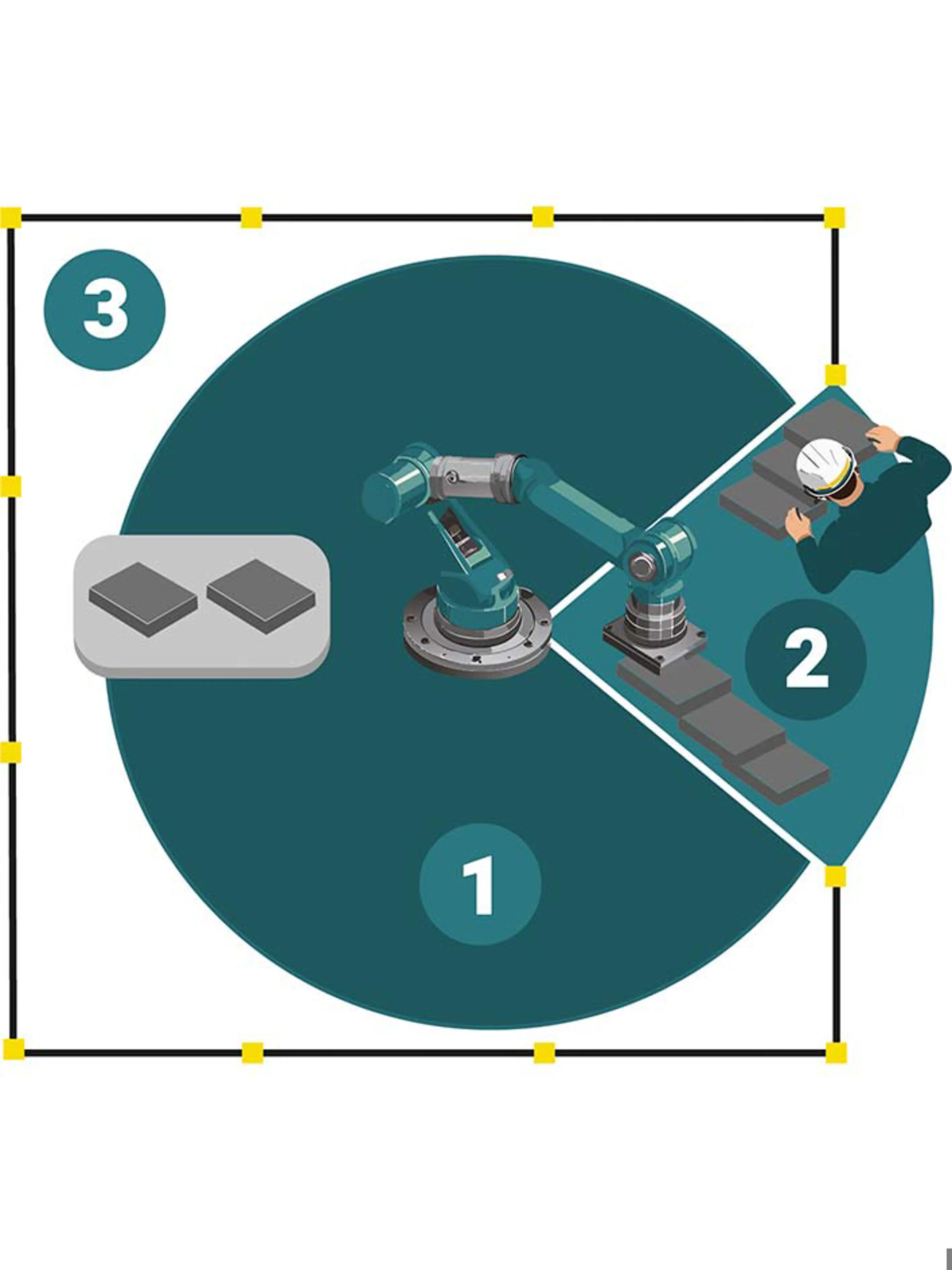
In de afbeelding rechts delen een menselijke operator en een robot de lichtgrijze werkruimte.
Veiligheidsmaatregelen:
- Een gevaarlijke robot mag niet bewegen in het gebied waar wordt samengewerkt als er een persoon aanwezig is.
- Afhankelijk van de afstand en de bewegingssnelheid van de persoon kan het zijn dat de robot moet vertragen en stoppen als de persoon nadert.
Veiligheidsafscherming:
- Veiligheidsafscherming zijn vandaag de dag nog steeds nodig in sommige toepassingen waarbij wordt samengewerkt en dat zal in de toekomst zo blijven.
- Afschermingen nemen nieuwe rollen aan, zoals het afbakenen van een samenwerkingsgebied van gewone werkplekken en looppaden.
Veiligheid van industriële robots
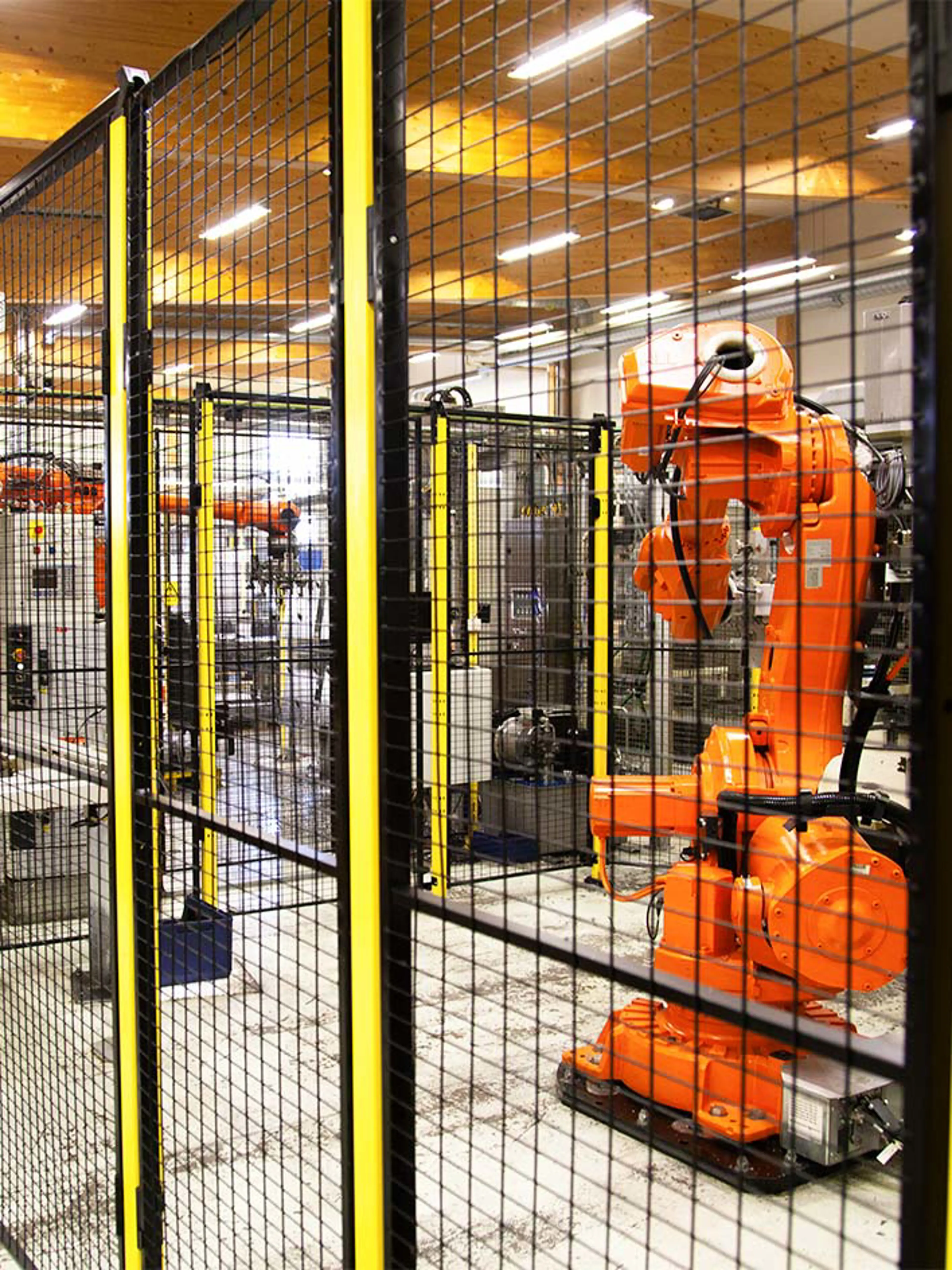
Robotveiligheid is grotendeels afhankelijk van gesloten “cellen” met omheiningen en toegangsdeuren. Maar in veel toepassingen zijn monitoringsystemen extra nodig of kunnen ze zelfs de robot “kooi” vervangen.
Geavanceerde detectiesystemen:
- In veel robotcellen wordt een combinatie van veiligheidshekken met deuren, lichtschermen en bereikscanners gebruikt.
- De meest geavanceerde vorm van een detectiesysteem is een 3D-camera. Deze moet op voldoende hoogte boven de werkruimte worden geïnstalleerd om ervoor te zorgen dat het alle gebieden “ziet” waarin personen kunnen bewegen.
Pas op voor personen die in de gevarenzone achter de detectieapparaten blijven. Als dat mogelijk is, kunnen extra veiligheidsmaatregelen nodig zijn.
Veilige ruimtes voor robots
Afschermingen mogen worden gebruikt om een “beschermde ruimte” te creëren, maar mogen normaal gesproken niet worden gebruikt om de “beperkte ruimte” af te bakenen.
Robots die met hoge snelheid of met grote kracht tegen hekken botsen, kunnen vervorming veroorzaken, zelfs in robuuste hekken, wat potentiële veiligheidsrisico's met zich meebrengt. Bovendien kunnen mensen door hekken hun vingers door de openingen steken, waardoor het risico op letsel toeneemt. Om deze problemen te beperken, moet er een minimale ruimte van 120 tot 200 mm worden aangehouden tussen de beperkte ruimte en de buitenste rand van het hekwerk.Lees meer over het berekenen en bepalen van de juiste hoogte en afstand van afschermingen in hoofdstuk 3.2 “Machineafschermingen selecteren”.
Daarom is het niet voldoende om alleen te vertrouwen op zogenaamde “robotveilige” omheiningen. Implementeer in plaats daarvan geschikte begrenzers om de veiligheid te garanderen, zoals:
- Motion control-software met veiligheidsclassificatie (conform ten minste PL = d volgens (EN) ISO 13849-1 of SIL 2 volgens (EN) IEC 62061)
- Mechanisme die de ruimte beperken of fysieke harde stops (bijv. stopblokken en pinnen)
- Externe begrenzers (bijv. mechanische stops of naderingsschakelaars)
De afscherming is bedoeld om mensen buiten te houden, niet de robot binnen.

“Robotveilige afschermingen - concept of misvatting?
Veel mensen vragen naar “robotveilige” afschermingen of wijzen op testresultaten van afschermingsfabrikanten die een impactweerstand van 2000 joule of meer laten zien.
De vraag zelf onthult een misvatting over robotveiligheid. Veiligheidsnormen voor robots vereisen dat de beweging van robots wordt beperkt door andere middelen dan hekken of andere beveiligingen.
Het bewegingsbereik van een robot is afhankelijk van zijn grootte. Vaak is deze “maximale ruimte” veel groter dan nodig is voor de uit te voeren handeling. Omdat systeemontwerpers zo weinig mogelijk vloeroppervlak willen gebruiken, wordt de robot geprogrammeerd om zich te houden aan een veel kleinere “beperkte ruimte”. Vervolgens worden hekken, lichtbakken en bereikscanners gebruikt om een “beschermde ruimte” rond de beperkte ruimte te definiëren die niet door personen mag worden betreden.
Er is echter praktisch altijd een veiligheidsafstand nodig tussen de beperkte ruimte en de beschermde ruimte. Waarom? Omdat de robot tijd nodig heeft om af te remmen en tot stilstand te komen wanneer een persoon die de beschermde ruimte betreedt wordt gedetecteerd (door een lichtscherm, scanner, camera of deurschakelaar).
Deze infographic laat zien hoe je kritisch kunt nadenken over veiligheidsafstanden voor industriële robots. Leer waarom veiligheidshekken belangrijk zijn, hoe ongelukken gebeuren en wanneer hekken misschien niet de enige oplossing zijn. Ontdek de belangrijkste overwegingen om mensen in de buurt van robots veilig te houden.